|
|
|
|
An eikonal based formulation for traveltime perturbation with respect to the source location |
Traveltime behavior due to source perturbations can be
estimated more accurately using higher-order
formulations. Considering that ![]() ,
, ![]() , and
, and ![]() represent
source perturbations in the
represent
source perturbations in the ![]() ,
, ![]() , and
, and ![]() directions,
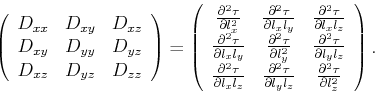
respectively, a full representation of the second derivative behavior
is given by the following symmetric matrix
directions,
respectively, a full representation of the second derivative behavior
is given by the following symmetric matrix
Similarly, higher order approximations in ![]() and
and ![]() are given by
are given by
To obtain the non-diagonal components of the matrix we differentiate
equation 3 with respect to ![]() , instead of
, instead of ![]() ,
yielding:
,
yielding:
Substituting the second derivative of traveltime with respect to
source location
![]() into equation E-4 provides us with a first order
linear equation in
into equation E-4 provides us with a first order
linear equation in ![]() given by:
given by:
Similar equations for the rest of the matrix components are given by
|
|
|
|
An eikonal based formulation for traveltime perturbation with respect to the source location |