|
|
|
|
Post-stack velocity analysis by separation and imaging of seismic diffractions |


|
|---|
|
gom,gom-dip
Figure 5. Second test example. (a) Near-offset section from a Gulf of Mexico dataset. (b) Local slopes estimated by plane-wave destruction. |
|
|

|
|---|
|
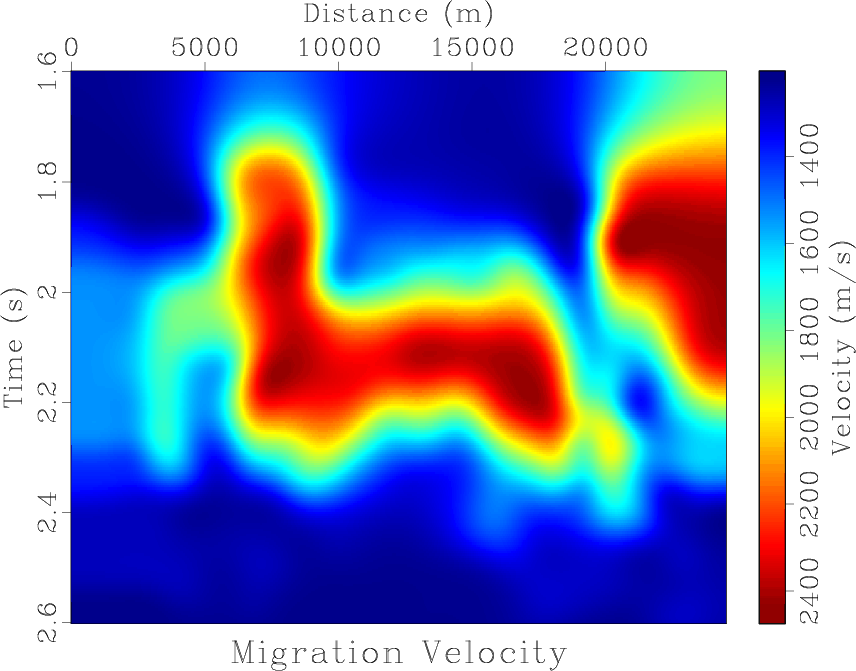
gom-pwd,gom-pik
Figure 6. Diffraction separation. (a) Diffraction events separated from data in Figure 5a. (b) Migration velocity picked from local varimax scans after velocity continuation of diffractions. |
|
|


|
|---|
|
gom-slc,gom-slc2
Figure 7. Migrated images. (a) Migrated diffractions from Figure 6a. (b) Initial data from Figure 5a migrated with velocity estimated by diffraction imaging. |
|
|
Figure 5a shows another example, also from the Gulf of Mexico. We used the nearest-offset section for diffraction analysis. Plane-wave destruction estimates dominant slopes of continuous reflection events [Figure 5b] and reveals numerous diffractions generated by rough edges of a salt body [Figure 6a]. We used shaping regularization (Fomel, 2007b) with the smoothing radius of 40-by-10 samples to constrain the slope-estimation process. Focusing analysis generates a time migration velocity [Figure 6b] suitable for collapsing diffractions [Figure 7a]. Both sharp edges of the salt body and continuous specular reflections appear in the final image [Figure 7b]. Inevitably, prestack depth migration (as opposed to time migration) is required to properly position the salt boundary in depth. Time migration, however, provides a reasonable first-order approximation computed at a small fraction of the cost.
|
|
|
|
Post-stack velocity analysis by separation and imaging of seismic diffractions |