|
|
|
|
Simultaneous denoising and reconstruction of 5D seismic data via damped rank-reduction method |
Next: Examples Up: Theory Previous: Rank-reduction method for 5D
|
|
|
|
Simultaneous denoising and reconstruction of 5D seismic data via damped rank-reduction method |
The damped TSVD of rank-reduction algorithm for 5D seismic data interpolation can be represented in operator notation as follows:
The filtered data is recovered with random noise attenuated and missing traces reconstructed by properly averaging along the anti-diagonals of the low-rank matrix
![]() obtained via the damped TSVD:
obtained via the damped TSVD:
In this paper, we pay our attention to the reconstruction of noisy data. Our final goal is to recover the useful signal from the observed noisy and incomplete data. It is worth mentioning that this type of problem often arises in the field of collaborative filtering (
![]() ). Similarly to those arising in the field of
). Similarly to those arising in the field of
![]() , seismic data reconstruction can be interpreted as a matrix completion problem. Missing traces in seismic data will introduce missing value in the observed data
, seismic data reconstruction can be interpreted as a matrix completion problem. Missing traces in seismic data will introduce missing value in the observed data
![]() . The corresponding level-four block Hankel matrix
. The corresponding level-four block Hankel matrix
![]() is expected to have rank
is expected to have rank ![]() . Random noise and missing data will increase the rank of
. Random noise and missing data will increase the rank of
![]() . Consequently, rank-reduction via the damped TSVD with the damping factor can be implemented to recover the useful signal and to reconstruct the missing records for 5D seismic volumes.
. Consequently, rank-reduction via the damped TSVD with the damping factor can be implemented to recover the useful signal and to reconstruct the missing records for 5D seismic volumes.
The modified weighted POCS-like algorithm based on conventional rank-reduction method for 5D seismic data interpolation can be shown as
![]() .
Revised by the improved rank-reduction filter
.
Revised by the improved rank-reduction filter
![]() , therefore our proposed improved rank-reduction algorithm for simultaneous 5D seismic data reconstruction and denoising can be formulated as follows:
, therefore our proposed improved rank-reduction algorithm for simultaneous 5D seismic data reconstruction and denoising can be formulated as follows:
A complete and detailed algorithm workflow of the proposed damped rank-reduction algorithm for 5D seismic data reconstruction and denoising is provided as follows:
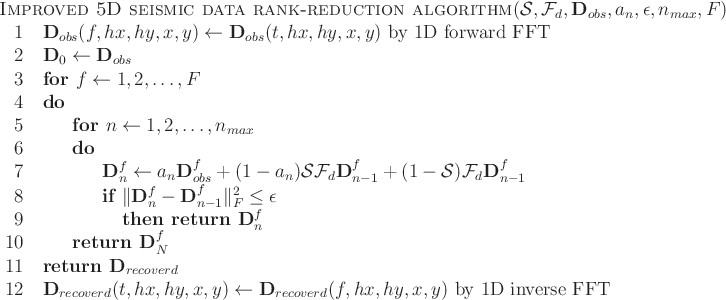
The iteration terminates after all ![]() frequencies are finished. For each frequency slice, the algorithm stops when either a maximum number of iterations
frequencies are finished. For each frequency slice, the algorithm stops when either a maximum number of iterations ![]() is reached or
is reached or
![]() , where
, where
![]() denotes the Frobenius norm and
denotes the Frobenius norm and ![]() denotes a small tolerance value.
denotes a small tolerance value.
|
|
|
|
Simultaneous denoising and reconstruction of 5D seismic data via damped rank-reduction method |