|
|
|
|
Structure-oriented singular value decomposition for random noise attenuation of seismic data |
Next: Structure-oriented SVD Up: Theory Previous: Noise attenuation using SVD
|
|
|
|
Structure-oriented singular value decomposition for random noise attenuation of seismic data |
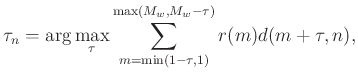
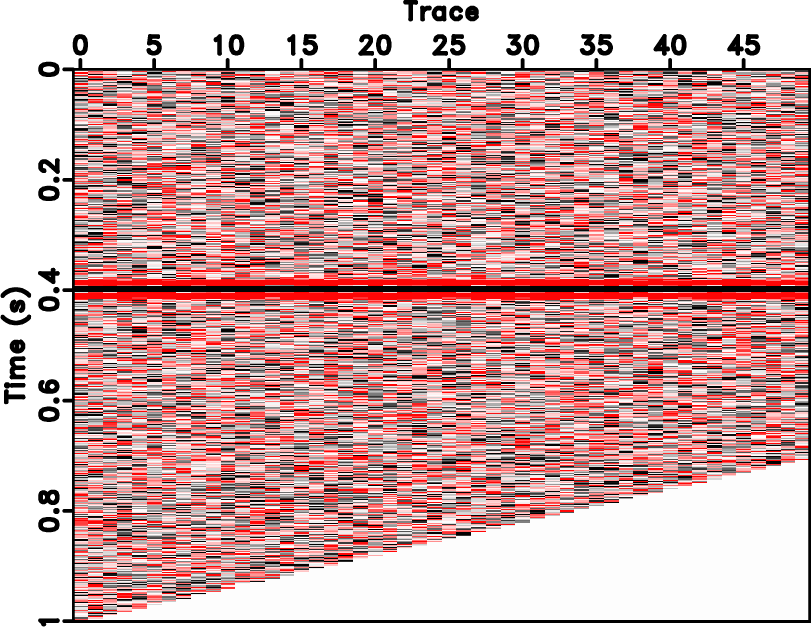
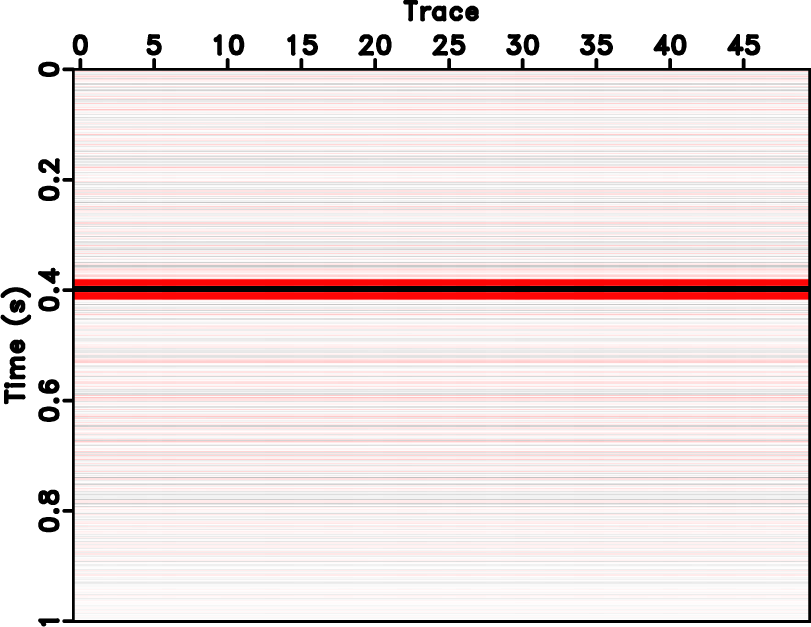
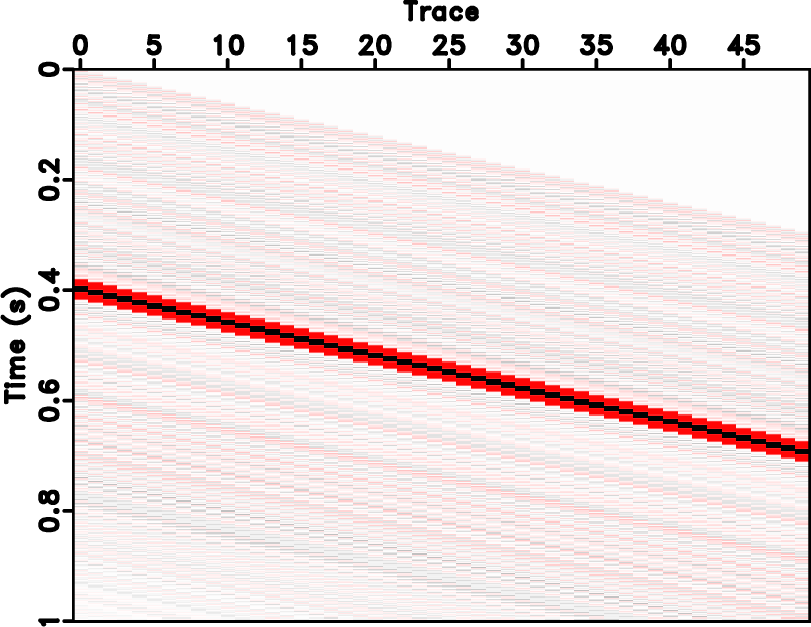
As can be seen from the equation 5, the selection of reference trace is crucial for the effectiveness of LSVD. It can be chosen as random trace in the processing window if the noise level is not high, or can be chosen as a stacked trace after normal-moveout (NMO) of common-midpoint gathers. Bekara and van der Baan (2007) proposed an iterative strategy for selecting the optimal reference trace stating that the resulting shifted traces are stacked after each cross-correlation pass for updating the new reference traces and the process of cross-correlation, shifting, and stacking is repeated until the process converges. Figure 1 shows a demonstration for dip steering and the processes of LSVD. Figure 1a is the original noisy dipping event. Figure 1b denotes the flattened event after forward dip steering. Figure 1c shows the LSVD denoised result by choosing only one singular value. The final denoised result after inverse dip steering on Figure 1c is shown in Figure 1d. The time shifts after the optimizing equation 5 are shown in Figure 2. The reference trace is simply chosen as the first trace of the original data, as shown in Figure 1a.

|
|---|
|
dn,dh,dhc,dc
Figure 1. Demonstration for dip steering and LSVD. (a) Noisy dip reflector. (b) Flattened event using dip steering. (c) SVD denoised result by selecting only one eigen-image. (d) Denoised data after inverse dip steering. |
|
|

|
|---|
|
shift
Figure 2. Time shifts for each trace for the forward dip steering as shown in Figure 1 (reference trace selected as the left trace in Figure 1a). |
|
|
|
|
|
|
Structure-oriented singular value decomposition for random noise attenuation of seismic data |