For SVMF,
becomes
, varying with respect to location
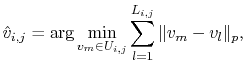
. The new filtering expression is:
(2)
where
is the output value for location
after applying a SVMF,
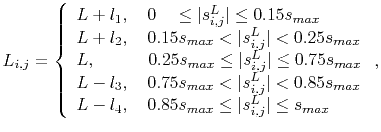
. The filter length
can be chosen through the following empirical criteria:
(3)
where
,
,
,
are predefined parameters corresponding to the increments or decrements for the length of filter window and are generally chosen as 4,2,2,4 in default, respectively;
is the signal reliability (SR), which can be defined as the local similarity (Fomel, 2007) between the initially filtered data
with a window length
and the original data
for point
:
(4)
Here,
denotes the local similarity between
and
, and
denotes the maximum value of the similarity map. Appendix A gives a short review of local similarity.