|
|
|
|
A variational formulation of the fast marching eikonal solver |
This section serves as a brief reminder of the well-known theoretical connection between Fermat's principle and the eikonal equation. The reader, familiar with this theory, can skip safely to the next section.
|
fermat
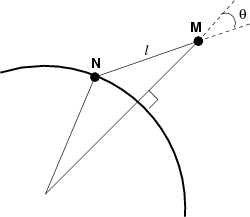
Figure 2. Illustration of the connection between Fermat's principle and the eikonal equation. The shortest distance between a wavefront and a neighboring point |
|
|---|---|
|
|
Both Fermat's principle and the eikonal equation can serve as the
foundation of traveltime calculations. In fact, either one can be
rigorously derived from the other. A simplified derivation of this
fact is illustrated in Figure 2. Following the notation
of this figure, let us consider a point ![]() in the immediate
neighborhood of a wavefront
in the immediate
neighborhood of a wavefront ![]() . Assuming that the source
is on the other side of the wavefront, we can express the traveltime
at the point
. Assuming that the source
is on the other side of the wavefront, we can express the traveltime
at the point ![]() as the sum
as the sum
If we accept the local Fermat's principle, which says that the ray
from the source to ![]() corresponds to the minimum-arrival time, then,
as we can see geometrically from Figure 2, the angle
corresponds to the minimum-arrival time, then,
as we can see geometrically from Figure 2, the angle
![]() in formula (4) should be set to zero to achieve
the minimum. This conclusion leads directly to the eikonal equation
(2). On the other hand, if we start from the eikonal
equation, then it also follows that
in formula (4) should be set to zero to achieve
the minimum. This conclusion leads directly to the eikonal equation
(2). On the other hand, if we start from the eikonal
equation, then it also follows that ![]() , which corresponds to
the minimum traveltime and constitutes the local Fermat's principle.
The idea of that simplified proof is taken from Lanczos (1966),
though it has obviously appeared in many other publications. The
situations in which the wavefront surface has a discontinuous normal
(given raise to multiple-arrival traveltimes) require a more elaborate
argument, but the above proof does work for first-arrival traveltimes
and the corresponding viscosity solutions of the eikonal equation
(Lions, 1982).
, which corresponds to
the minimum traveltime and constitutes the local Fermat's principle.
The idea of that simplified proof is taken from Lanczos (1966),
though it has obviously appeared in many other publications. The
situations in which the wavefront surface has a discontinuous normal
(given raise to multiple-arrival traveltimes) require a more elaborate
argument, but the above proof does work for first-arrival traveltimes
and the corresponding viscosity solutions of the eikonal equation
(Lions, 1982).
The connection between variational principles and first-order
partial-differential equations has a very general meaning, explained
by the classic Hamilton-Jacobi theory. One generalization of the
eikonal equation is
A known theorem (Smirnov, 1964) states that the propagation rays
[characteristics of equation (5) and, correspondingly,
bi-characteristics of equation (6)] are geodesic
(extreme-length) curves in the Riemannian metric
 is the usual Euclidean
distance metric. In this case, the geodesic curves are exactly
Fermat's extreme-time rays.
is the usual Euclidean
distance metric. In this case, the geodesic curves are exactly
Fermat's extreme-time rays.
From equation (7), we see that Fermat's principle in the general variational formulation applies to a much wider class of situations if we interpret it with the help of non-Euclidean geometries.
|
|
|
|
A variational formulation of the fast marching eikonal solver |