|
|
|
|
Seismic reflection data interpolation with differential offset and shot continuation |
A particularly efficient implementation of offset continuation results
from a log-stretch transform of the time coordinate
(Bolondi et al., 1982), followed by a Fourier transform of the
stretched time axis. After these transforms, the offset continuation
equation from (Fomel, 2003) takes the form
We can construct an effective offset-continuation finite-difference
filter by studying first the problem of wave extrapolation between
neighboring offsets. In the frequency-wavenumber domain, the
extrapolation operator is defined by solving the initial-value problem
on equation (1). The solution takes the following form
(Fomel, 2003):
Returning to the original domain, we can approximate the continuation
operator with a finite-difference filter with the ![]() -transform
-transform
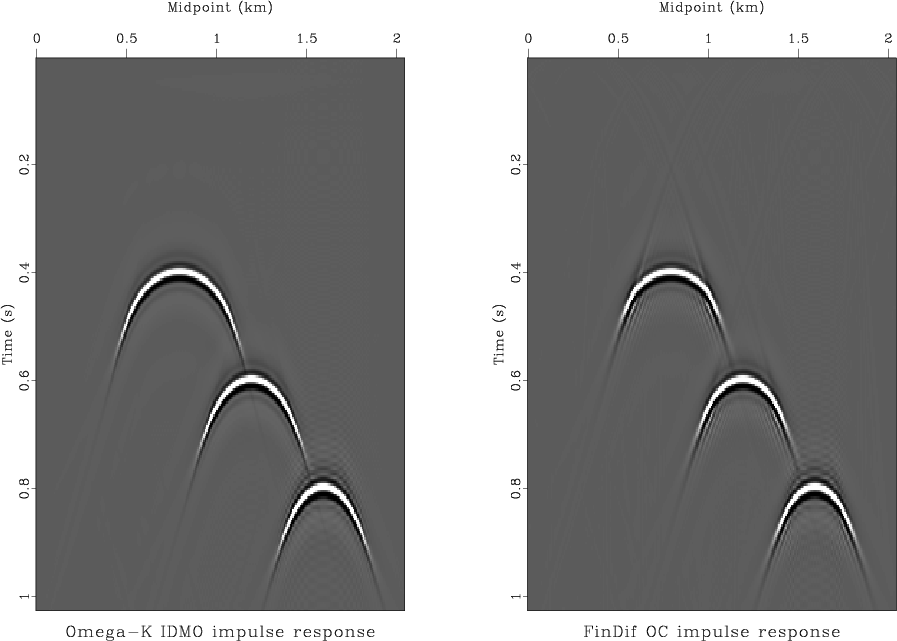
Figure 2 compares impulse responses of the inverse DMO
operator constructed by the asymptotic ![]() operator with those
constructed by finite-difference offset continuation. Neglecting
subtle phase inaccuracies at large dips, the two images look similar,
which provides an experimental evidence of the accuracy of the
proposed finite-difference scheme.
operator with those
constructed by finite-difference offset continuation. Neglecting
subtle phase inaccuracies at large dips, the two images look similar,
which provides an experimental evidence of the accuracy of the
proposed finite-difference scheme.
When applied on the offset-midpoint plane of an individual frequency
slice, the one-dimensional implicit filter (7)
transforms to a two-dimensional explicit filter with the
2-D ![]() -transform
-transform

|
|---|
|
arg
Figure 1. Phase of the implicit offset-continuation operators in comparison with the exact solution. The offset increment is assumed to be equal to the midpoint spacing. The left plot corresponds to |
|
|
|
|---|
|
off-imp
Figure 2. Inverse DMO impulse responses computed by the Fourier method (left) and by finite-difference offset continuation (right). The offset is 1 km. |
|
|
|
|
|
|
Seismic reflection data interpolation with differential offset and shot continuation |