|
|
|
|
Applications of plane-wave destruction filters |
Spitz (1991) popularized the application of
prediction-error filters to regular trace interpolation and showed how
the spatial aliasing restriction can be overcome by scaling the
lower frequencies of ![]() -
-![]() PEFs. An analogous technique for
PEFs. An analogous technique for ![]() -
-![]() filters was developed by Claerbout (1999,1992) and
was applied for 3-D interpolation with non-stationary PEFs by
Crawley (2000). The
filters was developed by Claerbout (1999,1992) and
was applied for 3-D interpolation with non-stationary PEFs by
Crawley (2000). The ![]() -
-![]() technique implies
stretching the filter in all directions so that its dip spectrum is
preserved while the coefficients are estimated at alternating
traces. After the filter is estimated, it is scaled back and used for
interpolating missing traces between the known ones. A very
similar method works for finite-difference plane wave destructors,
only we need to take special care of the aliased dips at the dip
estimation stage.
technique implies
stretching the filter in all directions so that its dip spectrum is
preserved while the coefficients are estimated at alternating
traces. After the filter is estimated, it is scaled back and used for
interpolating missing traces between the known ones. A very
similar method works for finite-difference plane wave destructors,
only we need to take special care of the aliased dips at the dip
estimation stage.
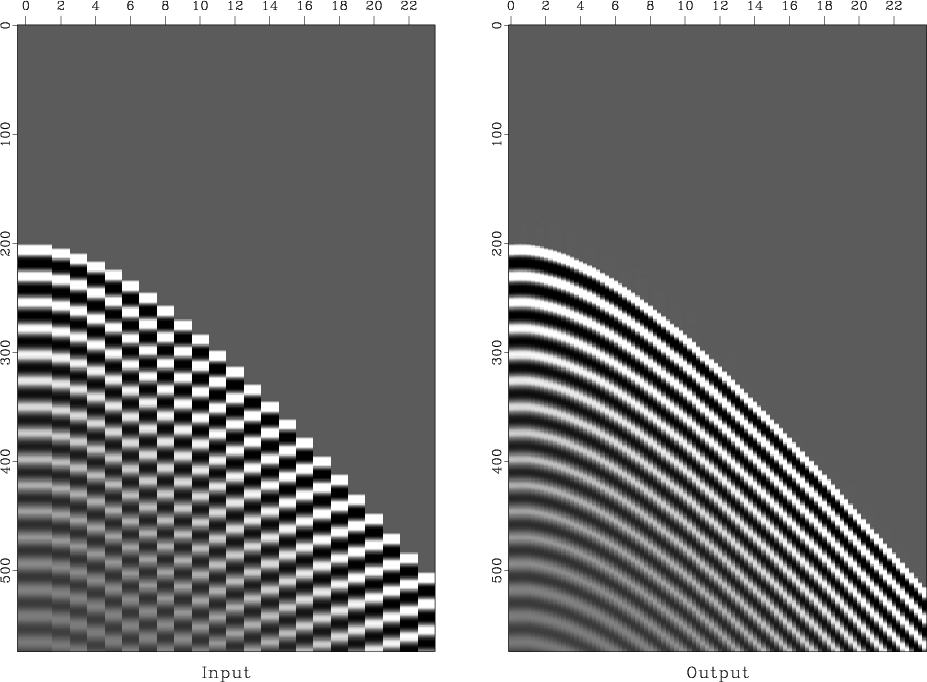
A simple synthetic example of interpolation beyond aliasing is shown in Figure 11. The input data are clearly aliased and non-stationary. To take the aliasing into account, I estimate the two dips present in the data with the slope estimation technique of equations (16) and (17-18). The first dip corresponds to the true slope, while the second dip corresponds to the aliased dip component. In this example, the true dip is non-negative everywhere and is easily distinguished from the aliased one. In the more general case, an additional interpretation may be required to determine which of the dip components is contaminated by aliasing. Throwing away the aliased dip and interpolating intermediate traces with the true dip produces the accurate interpolation result shown in the right plot of Figure 11. Three additional traces were inserted between each of the neighboring input traces.
|
|---|
|
aliasp0
Figure 11. Synthetic example of interpolation beyond aliasing with plane-wave destruction filters. Left: input aliased data, right: interpolation output.Three additional traces were inserted between each of the neighboring input traces. |
|
|
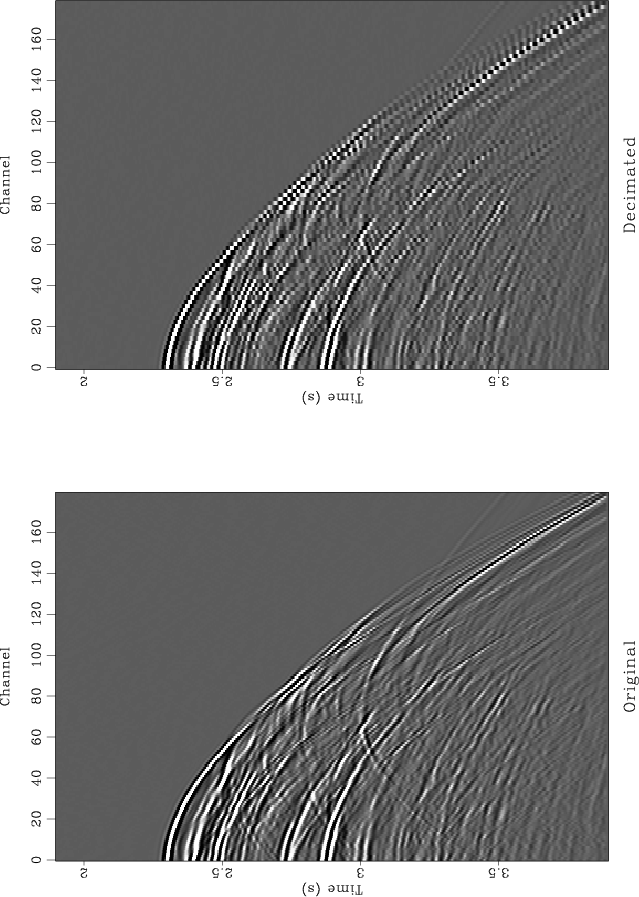
Figure 12 shows a marine 2-D shot gather from a deep water Gulf of Mexico survey before and after subsampling in the offset direction. The data are similar to those used by Crawley (2000). The shot gather has long-period multiples and complicated diffraction events caused by a salt body. The amplitudes of the hyperbolic events are not as uniformly distributed as in the synthetic case of Figure 11. Subsampling by a factor of two (the right plot in Figure 12) causes clearly visible aliasing in the steeply dipping events. The goal of the experiment is to interpolate the missing traces in the subsampled data and to compare the result with the original gather shown in the left plot of Figure 12.
|
|---|
|
sean2
Figure 12. 2-D marine shot gather. Left: original. Right: subsampled by a factor of two in the offset direction. |
|
|
A straightforward application of the dip estimation equations (16-18) applied to aliased data can easily lead to erroneous aliased dip estimation because the aliased dip may get picked instead of the true dip. In order to avoid this problem, I chose a slightly more complex strategy. The algorithm for trace interpolation of aliased data consists of the following steps:

|
|---|
|
sean2-dip
Figure 13. Two components of the estimated dip field for the decimated 2-D marine shot gather. |
|
|
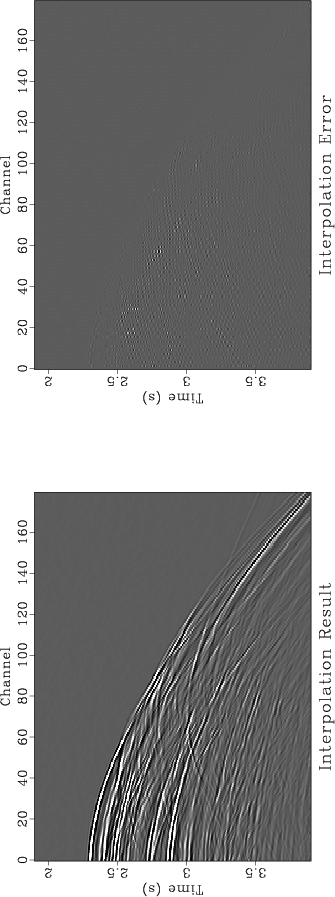
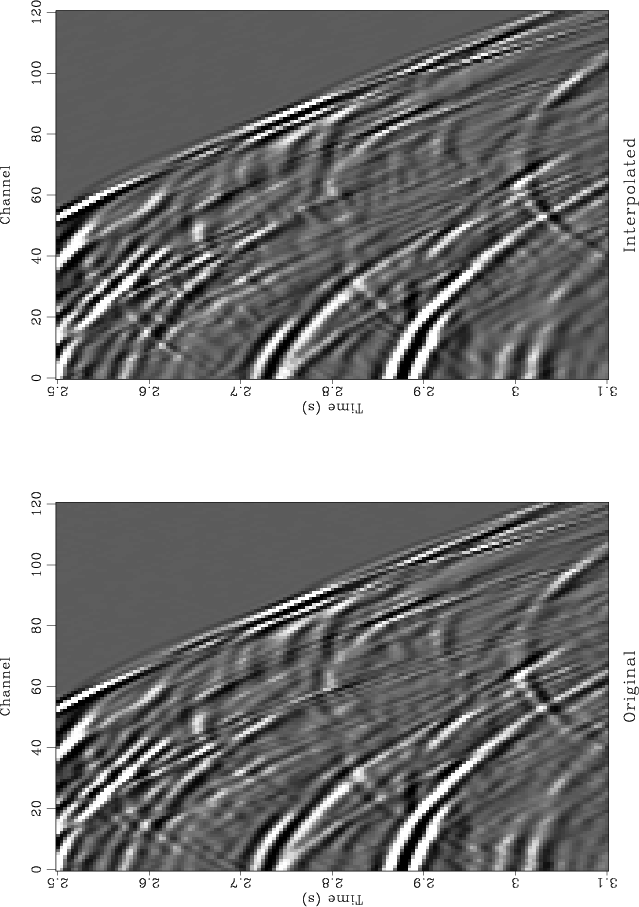
Figure 14 shows the interpolation result and the difference between the interpolated traces and the original traces, plotted at the same clip value. The method succeeded in the sense that it is impossible to distinguish interpolated traces from the interpolation result alone. However, it is not ideal, because some of the original energy is missing in the output. A close-up comparison between the original and the interpolated traces in Figure 15 shows that imperfection in more detail. Some of the steepest events in the middle of the section are poorly interpolated, and in some of the other places, the second dip component is continued instead of the first one.
|
|---|
|
sean2-int
Figure 14. Left: 2-D marine shot gather after trace interpolation. Right: Difference between the interpolated and the original gather. The error is zero at the location of original traces and fairly random at the location of inserted traces. |
|
|
|
|---|
|
sean2-close
Figure 15. Close-up comparison of the interpolated (right) and the original data (left). |
|
|
One could improve the interpolation result considerably by including another dimension. To achieve a better result, we can use a pair of plane-wave destructors, one predicting local plane waves in the offset direction and the other predicting local plane waves in the shot direction.
|
|
|
|
Applications of plane-wave destruction filters |