|
|
|
|
Applications of plane-wave destruction filters |
Signal and noise separation and noise attenuation are yet another important application of plane-wave prediction filters. A random noise attention has been successfully addressed by Canales (1984), Gulunay (1986), Abma and Claerbout (1995), Soubaras (1995), and others. A more challenging problem of coherent noise attenuation has only recently joined the circle of the prediction technique applications (Guitton et al., 2001; Spitz, 1999; Brown and Clapp, 2000).
The problem has a very clear interpretation in terms of the local dip
components. If two components, ![]() and
and ![]() are
estimated from the data, and we can interpret the first component as
signal, and the second component as noise, then the signal and noise
separation problem reduces to solving the least-squares system
are
estimated from the data, and we can interpret the first component as
signal, and the second component as noise, then the signal and noise
separation problem reduces to solving the least-squares system
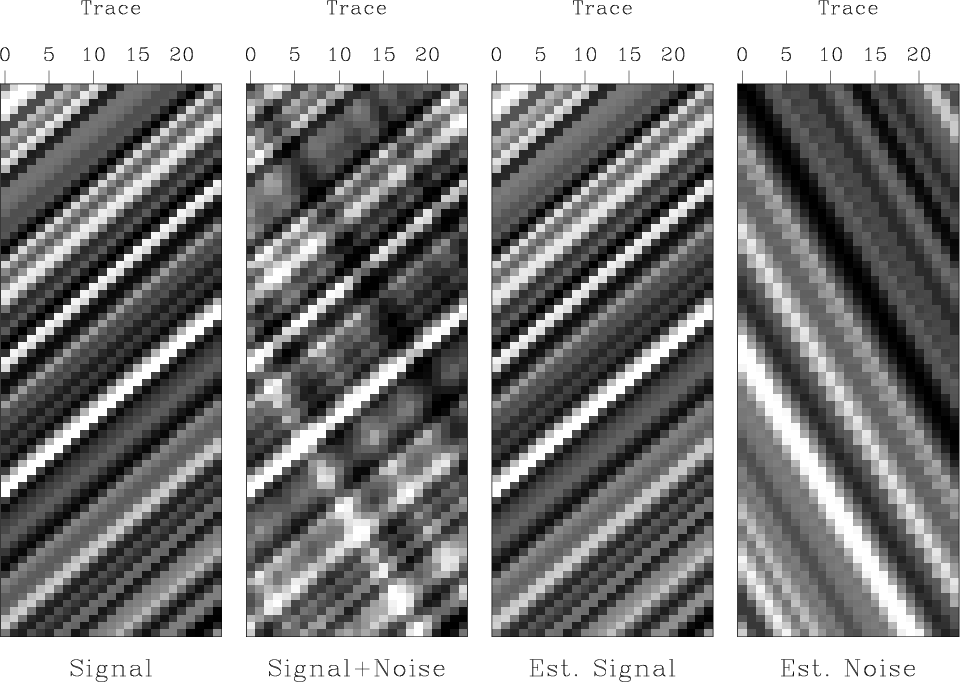
Figure 16 shows a simple example of the described approach. I estimated two dip components from the input synthetic data and separated the corresponding events by solving the least-squares system (22-23). The separation result is visually perfect.
|
|---|
|
sn2
Figure 16. Simple example of dip-based single and noise separation. From left to right: ideal signal, input data, estimated signal, estimated noise. |
|
|
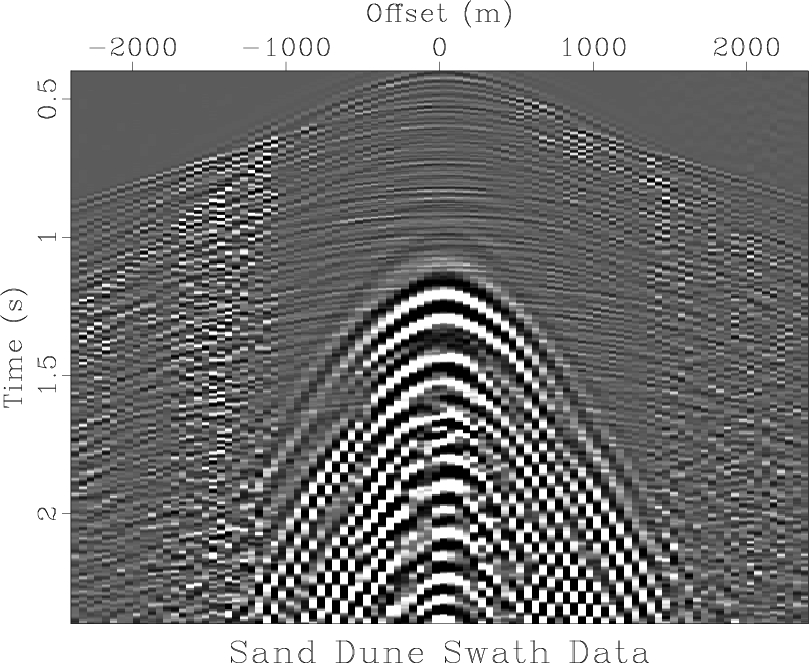
Figure 17 presents a significantly more complicated
case: a receiver line from of a 3-D land shot gather from Saudi
Arabia, contaminated with three-dimensional ground-roll, which appears
hyperbolic in the cross-section.
The same dataset has been used previously by Brown and Clapp (2000).
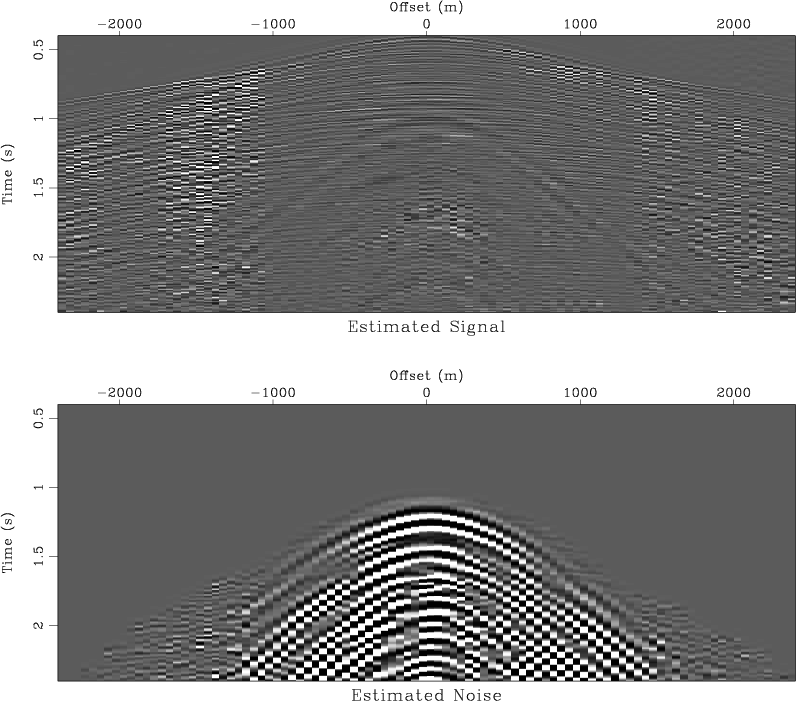
The ground-roll noise and the reflection events have a significantly
different frequency content, which might suggest separating
them on the base of frequency alone. The result of frequency-based
separation, shown in Figure 18 is, however, not ideal:
part of the noise remains in the estimated signal after the
separation. Changing the ![]() parameter in
equation (23) could clean up the signal estimate, but it
would also bring some of the signal into the subtracted noise. A
better strategy is to separate the events by using both the difference
in frequency and the difference in slope. For that purpose, I adopted
the following algorithm:
parameter in
equation (23) could clean up the signal estimate, but it
would also bring some of the signal into the subtracted noise. A
better strategy is to separate the events by using both the difference
in frequency and the difference in slope. For that purpose, I adopted
the following algorithm:
|
|---|
|
dune-dat
Figure 17. Ground-roll-contaminated data from Saudi Arabian sand dunes. A reciever cable out of a 3-D shot gather. |
|
|
|
|---|
|
dune-exp
Figure 18. Signal and noise separation based on frequency. Top: estimated signal. Bottom: estimated noise. |
|
|

|
|---|
|
dune-sn
Figure 19. Signal and noise separation based on both apparent dip and frequency in the considered receiver cable. Top: estimated signal. Bottom: estimated noise. |
|
|
The examples in this subsection show that when the signal and noise components have distinctly different local slopes, we can successfully separate them with plane-wave destruction filters.
|
|
|
|
Applications of plane-wave destruction filters |