|
|
|
|
Least-squares diffraction imaging using shaping regularization by anisotropic smoothing |
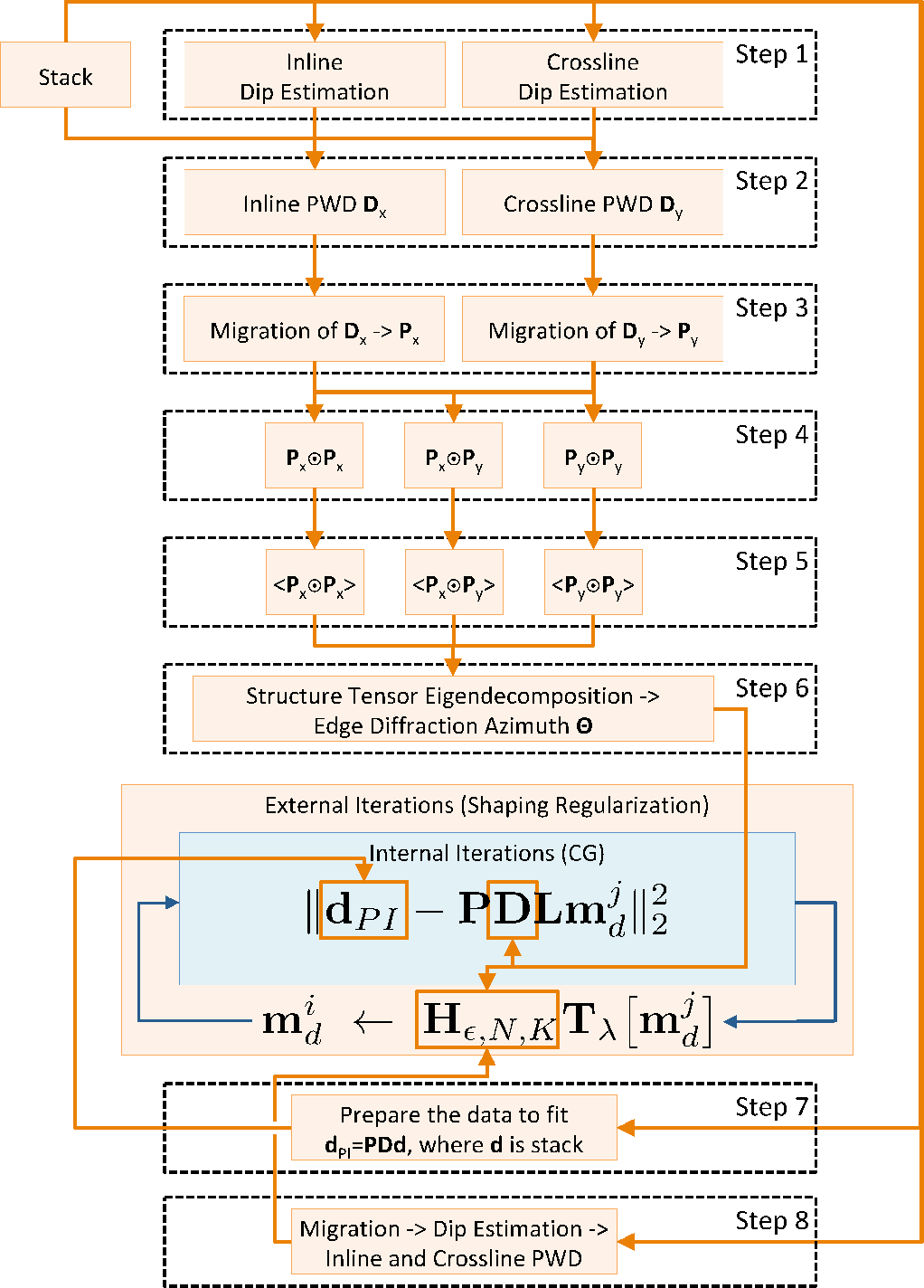
The workflow takes stacked data as the input. To generate all the inputs necessary for the inversion we propose the following sequence of procedures:
The sequence of procedures with their corresponding inputs and outputs is shown in Figure 2.
In the first step, dips are estimated using PWD (Fomel et al., 2007), and two volumes - one for the inline dips and
one for the crossline dips - are produced and further used for reflection removal in step 2.
In the second step, based on the two input dip volumes, reflections are predicted and suppressed:
two outputs are generated, which correspond to PWD filter application
in the inline (
![]() )
and in the crossline (
)
and in the crossline (
![]() ) directions
using the corresponding dip distributions. These two volumes with
reflections removed are then migrated (step 3) using conventional full-wavefield migration, e.g. 3D post-stack Kirchhoff migration.
For step 4, instead of explicitly computing structure tensor for each data sample according to equation 2,
volumes for each of its components can be pre-computed. The term
) directions
using the corresponding dip distributions. These two volumes with
reflections removed are then migrated (step 3) using conventional full-wavefield migration, e.g. 3D post-stack Kirchhoff migration.
For step 4, instead of explicitly computing structure tensor for each data sample according to equation 2,
volumes for each of its components can be pre-computed. The term ![]() structure-tensor component volume can be
generated by the Hadamard product between the migrated inline PWD volume (
structure-tensor component volume can be
generated by the Hadamard product between the migrated inline PWD volume (
![]() ) and itself, the
) and itself, the
![]() -component volume -
by the Hadamard product between the migrated crossline PWD volume (
-component volume -
by the Hadamard product between the migrated crossline PWD volume (
![]() ) and itself,
and the
) and itself,
and the ![]() -component volume -
by the Hadamard product between the migrated inline PWD volume (
-component volume -
by the Hadamard product between the migrated inline PWD volume (
![]() ) and the migrated crossline PWD volume (
) and the migrated crossline PWD volume (
![]() ).
Then, in step 5, the
).
Then, in step 5, the ![]() ,
, ![]() , and
, and ![]() structure-tensor component volumes
are input to edge preserving smoothing, which outputs the
structure-tensor component volumes
are input to edge preserving smoothing, which outputs the
![]() ,
,
![]() ,
and
,
and
![]() volumes. In step 6, structure tensor (equation 2)
eigendecomposition is performed ``on the fly'' by combining structure tensor component values
from the
volumes. In step 6, structure tensor (equation 2)
eigendecomposition is performed ``on the fly'' by combining structure tensor component values
from the
![]() ,
,
![]() ,
and
,
and
![]() volumes for each data sample. The result is the smaller eigenvalue eigenvector volume,
which is then converted to edge diffraction orientations
volumes for each data sample. The result is the smaller eigenvalue eigenvector volume,
which is then converted to edge diffraction orientations
![]() .
Step 7 gives the data to be fit by the inversion (equation 1).
Orientations of structures for AzPWD and for anisotropic smoothing regularization are estimated in step 6.
In anisotropic diffusion instead of derivatives in Cartesian coordinates we use PWDs in inline and crossline directions in the image domain
(
.
Step 7 gives the data to be fit by the inversion (equation 1).
Orientations of structures for AzPWD and for anisotropic smoothing regularization are estimated in step 6.
In anisotropic diffusion instead of derivatives in Cartesian coordinates we use PWDs in inline and crossline directions in the image domain
(
![]() in equation 3), dip estimation for which should be performed on a ``conventional" image
of a full wavefield stack (step 8).
Then, we invert the data for edge diffractions.
in equation 3), dip estimation for which should be performed on a ``conventional" image
of a full wavefield stack (step 8).
Then, we invert the data for edge diffractions.
|
|---|
|
schematic
Figure 2. Workflow chart illustrating the sequence of procedures and the relation of their corresponding inputs and outputs. Here, |
|
|
|
|
|
|
Least-squares diffraction imaging using shaping regularization by anisotropic smoothing |