|
|
|
|
Wide-azimuth angle gathers for wave-equation migration |
In this section we discuss the steps required to transform lag-domain CIPs into angle-domain CIPs using the moveout function derived in the preceding section. We also present the algorithm used for angle decomposition and illustrate it using a simple 3D model of a horizontal reflector in a medium with constant velocity which allows us to validate analytically the procedure.
The outer loop of the algorithm is over the CIPs evaluated during
migration. The angle decompositions of individual CIPs are independent
of one-another, therefore the algorithm is easily parallelizable over
the outer loop. At every CIP, we need to access the information about
the reflector normal (![]() ) and about the local velocity (
) and about the local velocity (![]() ). The
reflector dip information can be extracted from the conventional
image, and the velocity is the same as the one used for migration.
). The
reflector dip information can be extracted from the conventional
image, and the velocity is the same as the one used for migration.
Prior to the angle decomposition, we also need to define a direction
relative to which we measure the reflection azimuth. This direction is
arbitrary and depends on the application of the angle
decomposition. Typically, the azimuth is defined relative to a
reference direction (e.g. North). Here, we define this azimuth
direction using an arbitrary vector ![]() . Using the reflector normal
(
. Using the reflector normal
(![]() ) we can build the projection of the azimuth vector (
) we can build the projection of the azimuth vector (![]() ) in
the reflector plane as
) in
the reflector plane as
Then, for every azimuth angle ![]() , using the reflector normal
(
, using the reflector normal
(![]() ) and the azimuth reference (
) and the azimuth reference (![]() ), we can construct the trial
vector
), we can construct the trial
vector ![]() which lies at the intersection of the reflector and the
reflection planes. We scan over all possible vectors
which lies at the intersection of the reflector and the
reflection planes. We scan over all possible vectors ![]() , although
only one azimuth corresponds to the reflection from a given shot. This
scan ensures that we capture the reflection information from all shots
in the survey. Given the reflector normal (the axis of rotation) and
the trial azimuth angle
, although
only one azimuth corresponds to the reflection from a given shot. This
scan ensures that we capture the reflection information from all shots
in the survey. Given the reflector normal (the axis of rotation) and
the trial azimuth angle ![]() , we can construct the different vectors
, we can construct the different vectors
![]() by the application of the rotation matrix
by the application of the rotation matrix
Consider a simple 3D model consisting of a horizontal reflector in a
constant velocity medium. We simulate one shot in the center of the
model at coordinates ![]() km and
km and ![]() km, with receivers distributed
uniformly on the surface on a grid spaced at every
km, with receivers distributed
uniformly on the surface on a grid spaced at every ![]() m in the
m in the ![]() and
and ![]() directions. We use time-domain finite-differences for
modeling.
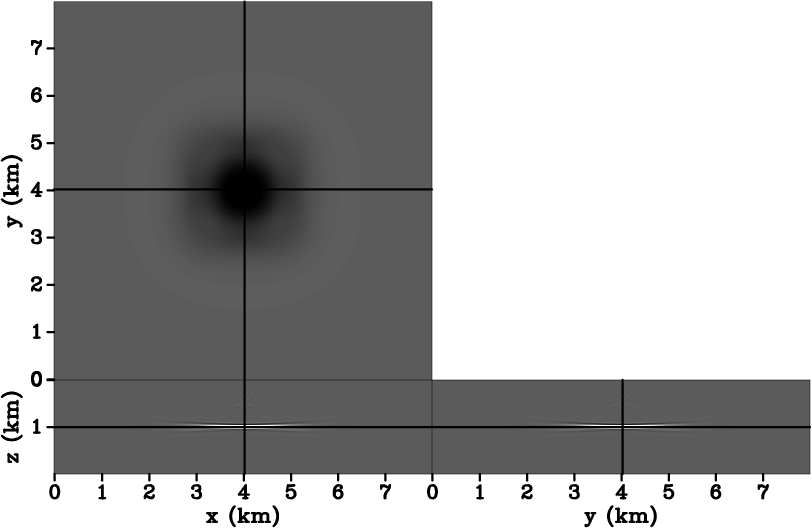
Figure 4 represents the image obtained by wave-equation migration
of the simulated shot using downward continuation. The illumination is
limited to a narrow region around the shot due to the limited array
aperture.
directions. We use time-domain finite-differences for
modeling.
Figure 4 represents the image obtained by wave-equation migration
of the simulated shot using downward continuation. The illumination is
limited to a narrow region around the shot due to the limited array
aperture.
|
img-3d
Figure 4. The image obtained for a horizontal reflector in constant velocity using one shot located in the center of the model. |
|
|---|---|
|
|
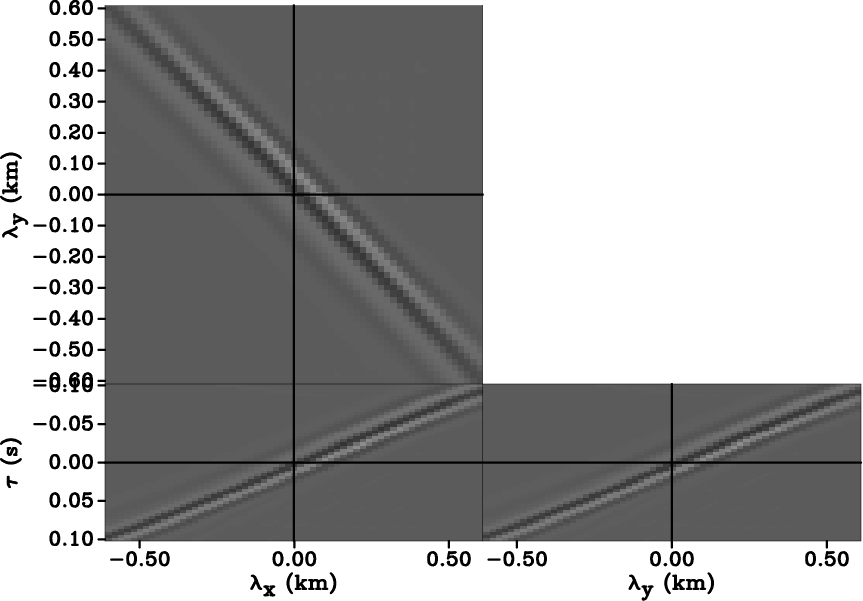
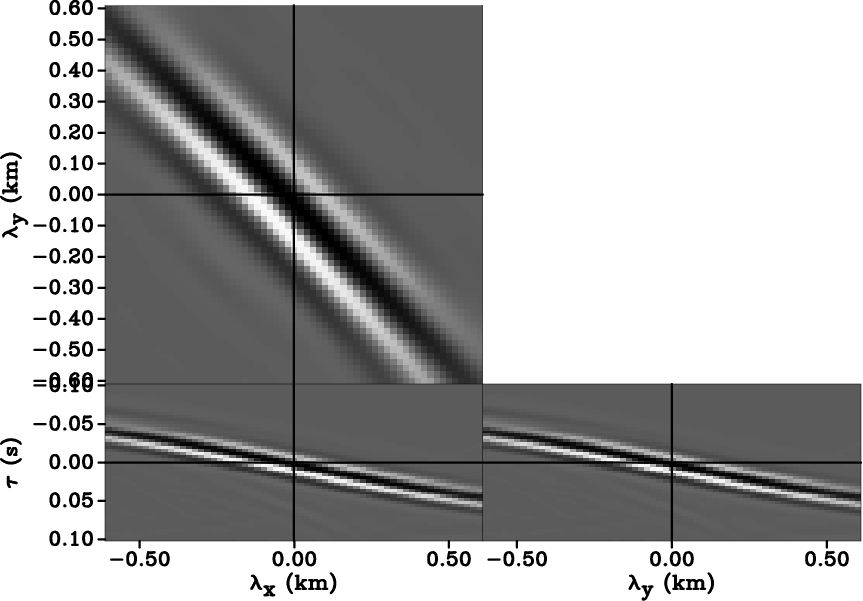
Figures 5(a)-5(d) depict CIPs obtained by migration of the
simulated shot at the reflector depth and at coordinates ![]() equal to
equal to
![]() km,
km,
![]() km,
km,
![]() km and
km and
![]() km, respectively. For these CIPs, the reflection angle
is invariant
km, respectively. For these CIPs, the reflection angle
is invariant
![]() , but the azimuth angles relative to
the
, but the azimuth angles relative to
the ![]() axis are
axis are
![]() ,
,
![]() ,
, ![]() and
and
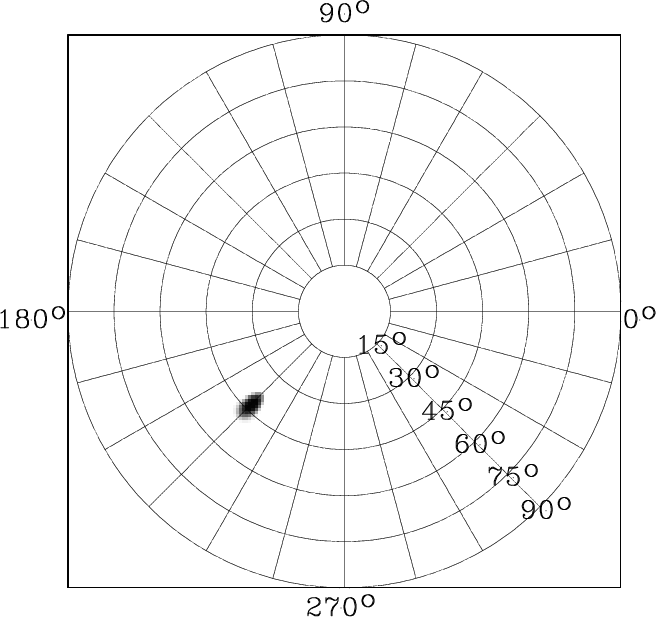
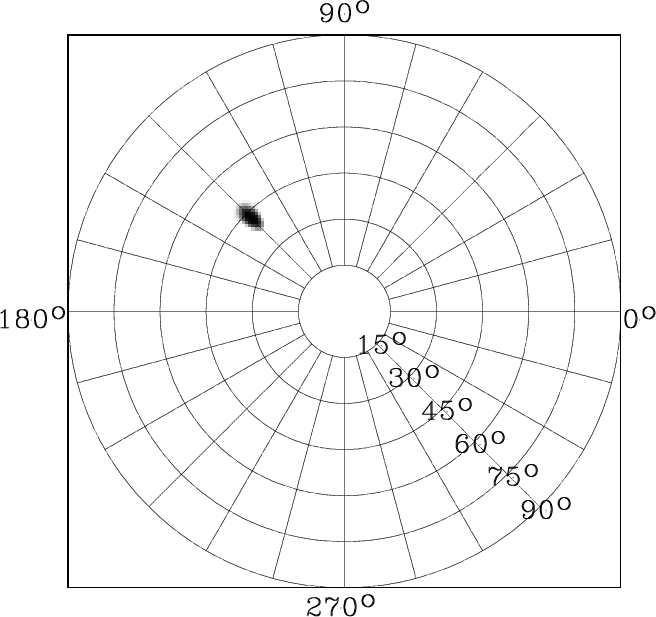
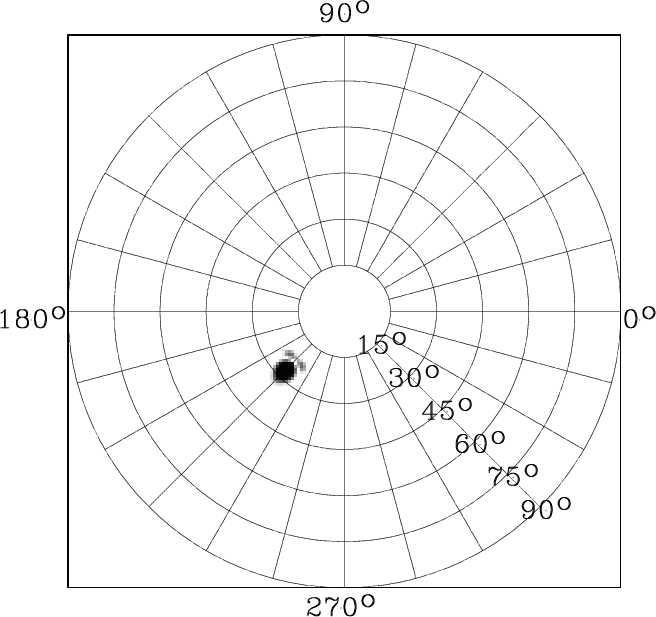
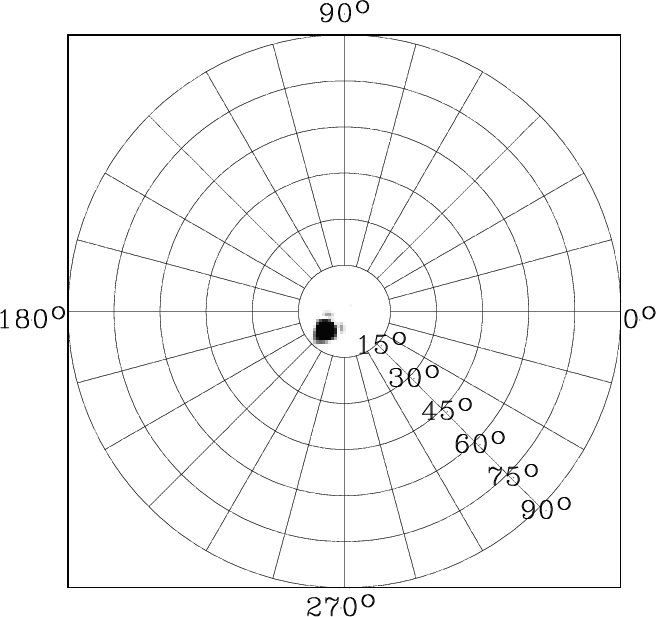
![]() , respectively. Figures 5(e)-5(h) show the angle
decomposition in polar coordinates. Here, we use the trigonometric
convention to represent the azimuth angle
, respectively. Figures 5(e)-5(h) show the angle
decomposition in polar coordinates. Here, we use the trigonometric
convention to represent the azimuth angle ![]() and we represent the
reflection angle in every azimuth in the radial direction (with normal
incidence at the center of the plot). Each radial line corresponds to
and we represent the
reflection angle in every azimuth in the radial direction (with normal
incidence at the center of the plot). Each radial line corresponds to
![]() and each circular contour corresponds to
and each circular contour corresponds to ![]() .
.



|
|---|
|
hic-A,hic-B,hic-C,hic-D,aca-A,aca-B,aca-C,aca-D
Figure 5. Illustration of CIP angle decomposition for illumination at fixed reflection angle. Panels (a)-(d) show lag-domain CIPs, and panels (e)-(f) show angle-domain CIPs in polar coordinates. The angles |
|
|
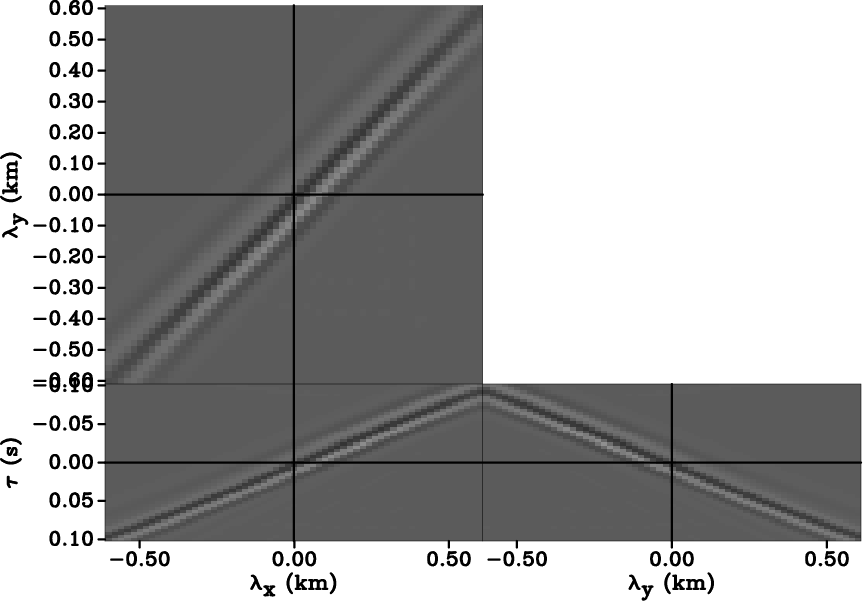
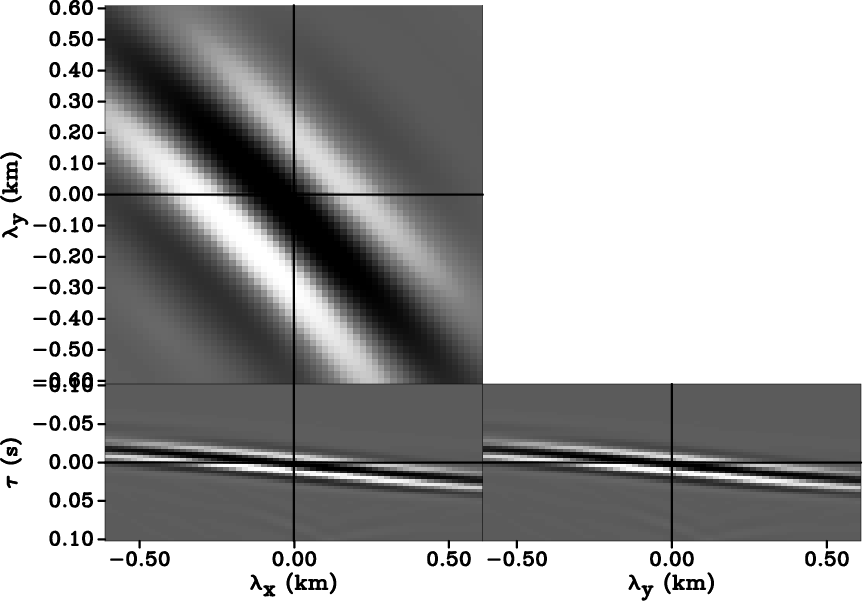
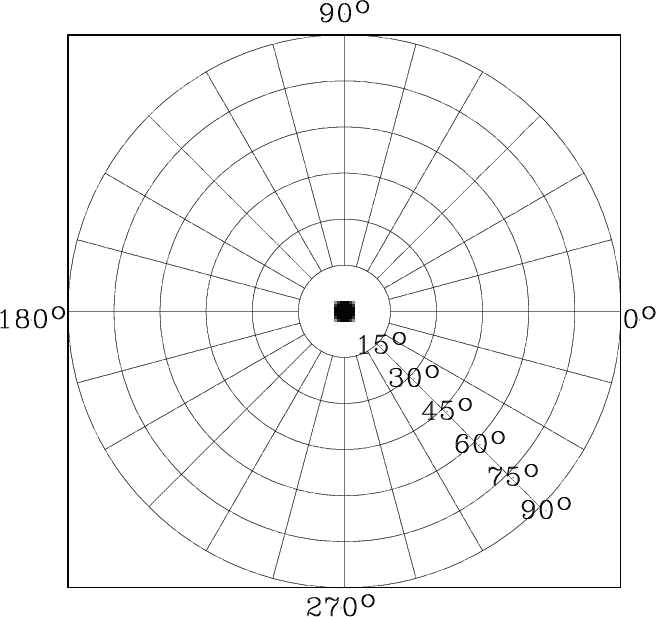
Similarly, Figures 6(a)-6(d) depict CIPs obtained by migration
of the simulated shot the reflector depth and at coordinates ![]() equal to
equal to
![]() km,
km,
![]() km,
km,
![]() km and
km and
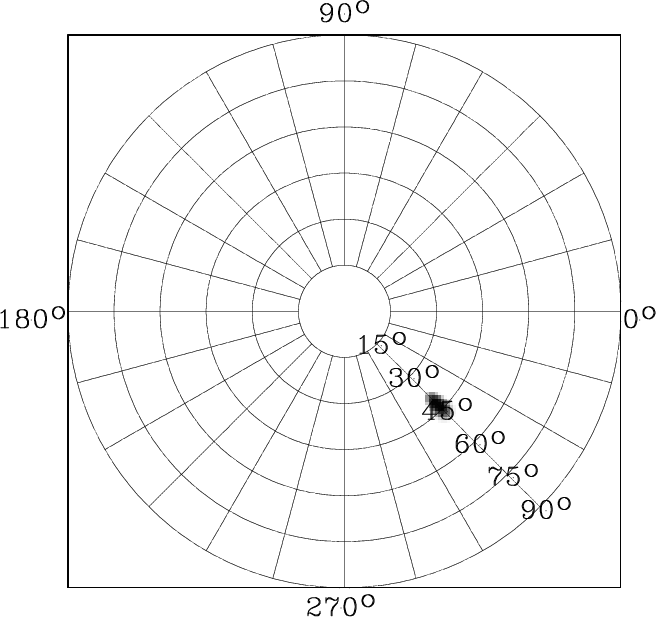
![]() km, respectively. For these CIPs, the azimuth angle is
invariant
km, respectively. For these CIPs, the azimuth angle is
invariant
![]() , but the reflection angles relative to the
reflector normal are
, but the reflection angles relative to the
reflector normal are
![]() ,
,
![]() ,
,
![]() , and
, and
![]() respectively.
respectively.



|
|---|
|
hic-F,hic-G,hic-H,hic-I,aca-F,aca-G,aca-H,aca-I
Figure 6. Illustration of CIP angle decomposition for illumination at fixed azimuth angle. Panels (a)-(d) show lag-domain CIPs, and panels (e)-(h) show angle-domain CIPs in polar coordinates. The angles |
|
|
In all examples, the decomposition angles correspond to the theoretical values, thus confirming the validity of our decomposition.
|
|
|
|
Wide-azimuth angle gathers for wave-equation migration |
![$\displaystyle Q\left ({\bf n},\phi \right)= \left [\begin{array}{ccc} n_x^2+\le...
...)+n_x\sin\phi & n_z^2+\left (n_x^2+n_y^2 \right)\cos\phi \ \end{array} \right]$](img62.png)